注:本篇博文全部源码下载地址为:。
一、转换矩阵
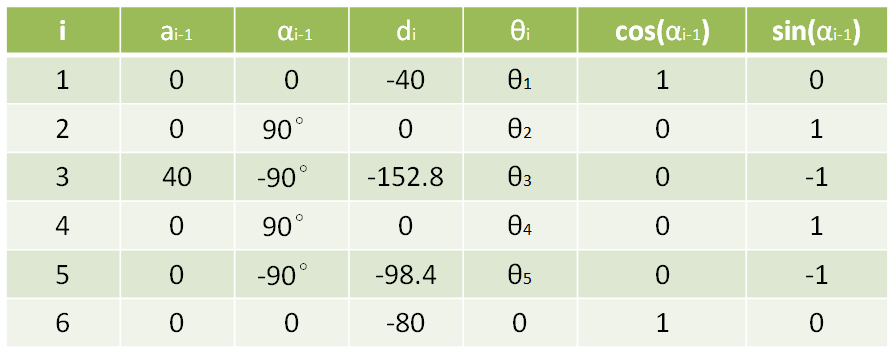
经过上一篇博客介绍,我们已经获得了Rob一个手臂的D-H参数表,如上表所示,我们要把这些参数转换成相邻坐标系的转换矩阵,D和H两位老前辈已经推导出通用公式了,通用公式如图1,其中cθi = cos(θi) ,sθi = sin(θi )。这是一个4x4的矩阵,它表征了相邻两个坐标系的位置和姿态两个维度的转换关系,具体说明见上一篇博文。

图1
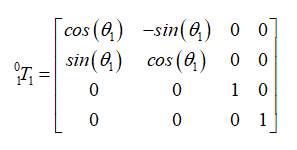
套用图1中的公式,我们分别得到坐标系{1}相对于坐标系{0}的转换矩阵T1如下:
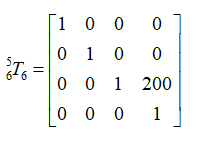
同理,我们得到坐标系{2}相对于坐标系{1}的转换矩阵T2,{3}相对于{2}的转换矩阵T3,{4}相对于{3}的转换矩阵T4,{5}相对于{4}的转换矩阵T5,{6}相对于{5}的转换矩阵T6,分别如下 :

至此,我们得到了所有相邻坐标系的转换矩阵,由于他们是串联的,我们可以得到坐标系{6}相对于坐标系{0}的转换矩阵T2:
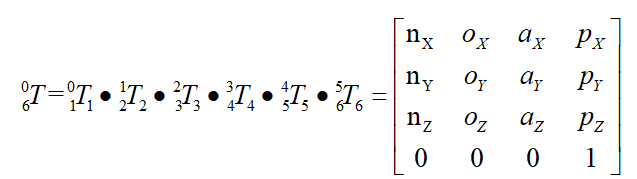 式1
式1
其中(s1指θ1,s2指θ2,以此类推):
nx = - cos(s5)*(cos(s4)*(sin(s1)*sin(s3) - cos(s1)*cos(s2)*cos(s3)) + cos(s1)*sin(s2)*sin(s4)) - sin(s5)*(cos(s3)*sin(s1) + cos(s1)*cos(s2)*sin(s3));
ny = cos(s5)*(cos(s4)*(cos(s1)*sin(s3) + cos(s2)*cos(s3)*sin(s1)) - sin(s1)*sin(s2)*sin(s4)) + sin(s5)*(cos(s1)*cos(s3) - cos(s2)*sin(s1)*sin(s3)); nz = cos(s5)*(cos(s2)*sin(s4) + cos(s3)*cos(s4)*sin(s2)) - sin(s2)*sin(s3)*sin(s5); ox = sin(s5)*(cos(s4)*(sin(s1)*sin(s3) - cos(s1)*cos(s2)*cos(s3)) + cos(s1)*sin(s2)*sin(s4)) - cos(s5)*(cos(s3)*sin(s1) + cos(s1)*cos(s2)*sin(s3)); oy = cos(s5)*(cos(s1)*cos(s3) - cos(s2)*sin(s1)*sin(s3)) - sin(s5)*(cos(s4)*(cos(s1)*sin(s3) + cos(s2)*cos(s3)*sin(s1)) - sin(s1)*sin(s2)*sin(s4)); oz = - sin(s5)*(cos(s2)*sin(s4) + cos(s3)*cos(s4)*sin(s2)) - cos(s5)*sin(s2)*sin(s3); ax = sin(s4)*(sin(s1)*sin(s3) - cos(s1)*cos(s2)*cos(s3)) - cos(s1)*cos(s4)*sin(s2); ay = - sin(s4)*(cos(s1)*sin(s3) + cos(s2)*cos(s3)*sin(s1)) - cos(s4)*sin(s1)*sin(s2); az = cos(s2)*cos(s4) - cos(s3)*sin(s2)*sin(s4); Px = 40*cos(s1)*cos(s2) - (764*cos(s1)*sin(s2))/5;Py = 40*cos(s2)*sin(s1) - (764*sin(s1)*sin(s2))/5;
Pz = (764*cos(s2))/5 + 40*sin(s2);
由于时间关系,暂时先不把具体过程写下来,其实源代码里面全部都有,需要的请先去文章开头的代码仓下载代码来看。
tip:
源码是一个VS工程,基于VS2010创建。
<-- 未完待续 -->
欢迎留言、私信、邮箱、微信等任何形式的技术交流。
作者信息:
名称:Shawn
邮箱:zhanggx0102@163.com
微信二维码:↓
